One hull is winched toward the other on the water. The beams slide through one of the hulls, on teflon cleats in the glass tube.
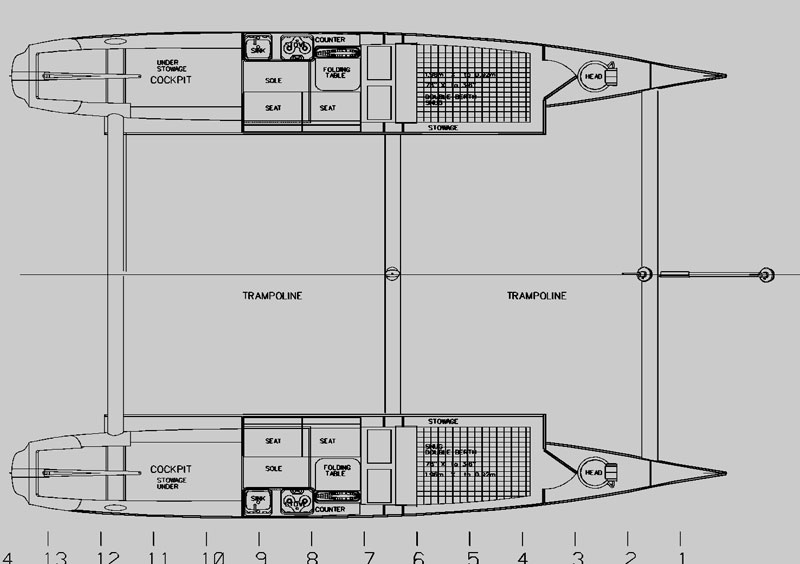
This is a two couples arrangement. One couple would probably have shower in the other hull, ond only one berth.
One hull is winched toward the other on the water. The beams slide through one of the hulls, on teflon cleats in the glass tube.
This is a two couples arrangement. One couple would probably have shower in the other hull, ond only one berth.
I went 3 days and her nights at sea on a catamaran ( 35 ft ) , and came with an idea, what if the deck can be free from the hulls, i think on a suspension system to reduce the movement, no i am not a boat designer, now that start tolook on designs like this ,mindesde to be trailerable, if i place hinges betwen the hulls ( or a water shock absorber system ) i think that the effect on the deck can be less, is the idea, have any reference on the name of the proposed hull? this may be build by some one before, nothing is new, just new to a new sailor.
you have to explain if you mean bridgedeck or hull deck.
Kurt, is this design amenable to two free standing masts like Cat2fold ( not sure if that was a free standing system )? l could see the masts going between the pillows on the bed and being stepped into the sole. How wide are the hulls? Nice design!
Tom
Thanks. Should be with approriate reinforcements. I have not looked at interior effect though.
Would this design be amenable to dual free standing masts like cat 2 fold ( not sure if those were free standing )?
Like the design!
Tom
Probably needs a double wide ramp or screw in (slide in) connections. The mast length 40 feet? Is this going to be production? South West of Down Under they sell them for $70K delivered and 40K kit. The F-Place…